Setting Performance Targets: Excitement, Acceleration, Torque, Tyres, and Speed

Before locking in motors, batteries, or gearing for the E23, we needed to define what the car actually needed to be.
The first goal wasn’t a number. The E23 needs to feel exciting and dynamic, something you’re not going to find the limits of in the first ten minutes — or the first ten months. It needs to keep challenging the driver. If a car becomes fully understood too quickly, it gets boring fast, no matter how impressive the spec sheet looks. That requirement sits above everything else.
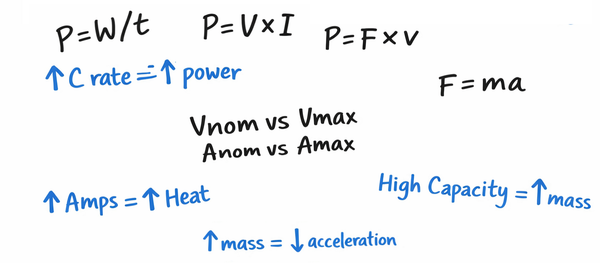
The second goal was more measurable: strong acceleration, with a target of 0–100 km/h in under 3 seconds. That number wasn’t chosen for bragging rights. It was chosen because it forces the drivetrain into a traction‑limited regime. If the car is traction limited, it means the system has torque in reserve. That matters far more for a drift‑focused platform than peak power figures ever will.
These targets also had to sit within a very real framework: an affordable, high‑performance, high‑quality machine. We had no interest in building an engineering masterpiece that no one can afford, or a fancy looking buggy that breaks on the second run and becomes unserviceable because parts can’t be sourced. There’s no shortage of examples of the latter. Everything had to be achievable with durable, serviceable, globally available components, without turning the E23 into an over‑engineered science project.
Tyres as a Design Input
Tyres are often treated as something you choose at the end, once everything else is already fixed. For the E23, we did the opposite.
Tyres were treated as a primary design input because they directly define:
- maximum available tractive force
- required wheel torque to exceed grip
- effective gearing through rolling radius
- brake sizing and packaging
- unsprung mass and rotational inertia
Until tyre size and type are fixed, torque and power targets quickly turn into guesswork.
Wheel and Tyre Size Selection
The aim was to use the smallest practical wheel and tyre package that could still meet performance, durability, and braking requirements. Smaller overall diameter helps in obvious ways:
- shorter effective gearing
- lower rotational inertia
- reduced unsprung mass
- better acceleration and response
But there are limits. Go‑kart wheels and tyres were ruled out immediately. They simply don’t have the structural capacity, thermal mass, or brake packaging needed to repeatedly stop a ~350–400 kg vehicle from real speed.
We also looked at 10‑inch wheels. They’re common in a couple of places. Formula SAE cars use 10" wheels successfully, but the tyres are usually race slicks built for circuit work. They’re brilliant, but they’re expensive, wear fast, and don’t match the “run it hard, service it easily, replace parts without drama” reality we’re designing around. Cross karts also run 10" wheels, and fair play — they work. But on a buggy shaped like the E23, tiny wheels start to look a bit… toy‑like. The car ends up looking like it’s skipped leg day. We wanted the proportions to suit the vehicle as well as the engineering.
Why 13‑Inch Wheels
We landed on 13‑inch wheels as the best overall compromise.
They offer:
- enough diameter to package proper motorsport brake hardware, including Wilwood calipers and rotors
- broad availability of suitable tyres for drift and rallycross use
- relatively low wheel and tyre mass compared to larger automotive sizes
- proven, globally available components at sensible cost
Crucially, they let us achieve the required brake capacity without giving up the gearing and inertia advantages of a small overall tyre diameter.
Tyre Choices
With wheel size fixed, tyre selection became much more focused.
For the drift‑focused configuration, the reference tyre is Nankang NS‑2R, 175/50R13 (TW120). This is a very popular tyre among drift enthusiasts and competitors. It’s realistically priced, widely available, and well understood. It offers predictable breakaway and consistent behaviour under sustained wheelspin. The compact overall diameter — around 506 mm — also helps increase effective wheel torque, which supports both acceleration and controllability. Just as importantly, Nankang were receptive to our enquiries, and open to discussions around support and partnership. That matters when you’re trying to build something that can be sustained long‑term, not just prototyped once.
For rallycross and mixed‑surface use, we wanted a cross‑purpose tyre that would fit the same wheel, work with the same brake package, and offer better compliance and durability on rough surfaces. We haven’t locked in a supplier yet, but a leading contender is Yokohama ADVAN A035, 165/65R13. This tyre has a taller overall diameter, around 551 mm, more sidewall compliance, and proven durability on loose and rough surfaces, while remaining compatible with the same wheels and brakes.
Using a common wheel size keeps packaging simple, while the tyre choice does the work of tuning the car to the application.
Acceleration vs Top Speed
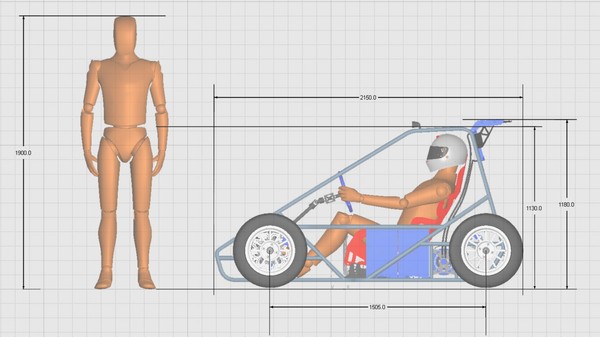
Top speed still mattered — just not in the way it does for a road car.
The E23 is small, open, and low to the ground. At speed, everything feels faster than the numbers suggest. You don’t need extreme top speed for the car to feel intense. There’s also a real trade‑off between wheel torque, top speed, motor size, and battery mass. Chasing higher top speed pushes you toward taller gearing, larger motors, and more battery capacity. All of that adds weight and works directly against the sharp, responsive behaviour the E23 is meant to have.
Given the intended use cases — tight circuits, small venues, drift, cornering, and outright fun — acceleration was prioritised over top speed. The targets we settled on were 120–130 km/h (75–80 mph) as a realistic, usable top speed, with ~160 km/h (100 mph) as a practical upper limit, not a design goal. That’s more than enough in a car like this, while allowing the drivetrain to be sized around torque delivery rather than outright speed.
Implications for Drivetrain Sizing
Once tyre size and rolling radius were locked in, the drivetrain targets stopped being guesswork.
From there we did two very practical things:
- We calculated and sanity‑checked traction limits (wheel torque vs available grip), and confirmed the car would be traction limited rather than power limited in the zones we care about. That was the whole point of setting the acceleration target where we did — torque in reserve, not a car that runs out of shove the moment you ask it to rotate.
- We started framing the duty cycle for the motor, battery, and the rest of the system. Not “maximum power forever”, but what the car will actually do: short pulls, repeated transitions, sustained wheelspin, and the sort of abuse a drift platform lives on. That then feeds into the next design step: cooling and thermal margins for the motor, inverter, battery, and driveline.
One thing we didn’t worry about much at this stage was wheel and tyre thermal capacity. Both of the tyre options we’re considering are designed to live under cars weighing 1000 kg+, so on a ~350–400 kg buggy they’re not the limiting component from a heat or load perspective. The limiting factor is far more likely to be how we use the torque (and how the drivetrain sheds heat) than whether the tyres can “handle” it structurally.
So the order of operations here was simple: tyres set the grip and gearing, then we size the drivetrain to exceed that grip, then we make sure the system survives the duty cycle. In short, the tyres set the rules. Once those rules were defined, the rest of the system could be sized to exceed them.